Potentia Robotics: engineering the future
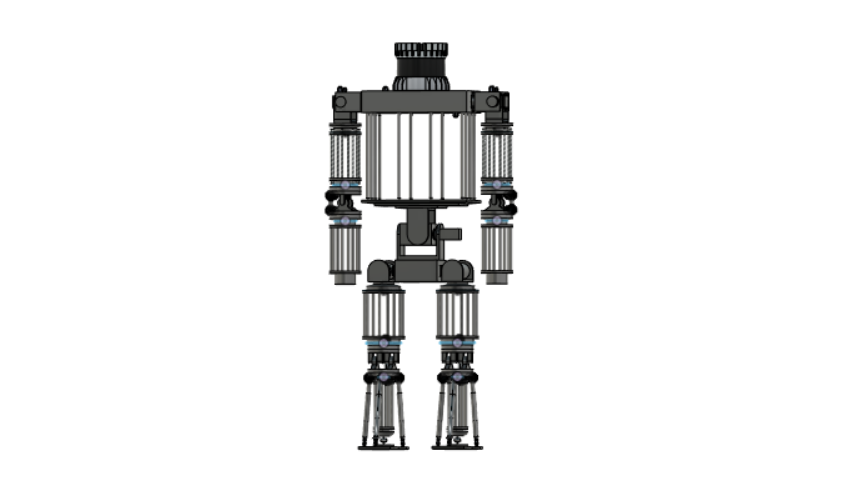
Olympian’s skeleton has been modeled with CAD and is now going through numerous testing simulations. Potentia Robotics recently finished with the 3d modeling after having made some unplanned adjustments. “We had to tweak our design a little bit because the motors that we need are a little more powerful than we expected.” Vasantharao said.
October 18, 2021
Parts are expensive, code is complicated, and bugs can take weeks to iron out. This did not stop junior Aditya Vasantharao from founding the company Potentia Robotics which has set out to build a fully functional humanoid robot.
“It’s a really great way to get a lot of high-level minds together working on a project,” junior Audhav Durai, Potentia Robotics co-founder and software lead, said.
Potentia Robotics has the goal of creating a robot capable of performing basic motor operations, such as navigating a room, all while operating with humanoid motions. This is a massive task as comparable robot designs, such as the Atlas robot from Boston Robotics, are still in development and have taken years to learn to walk and are only now learning how to dance. With such a monumental task ahead of Potentia Robotics it’s fitting that their robot has been affectionately nicknamed by the team “Olympian.”
“We want it to be functioning like a human in the sense that we want to walk and move like a human.” Durai said.
The movement structures behind human walking are extremely complex, and building a rig capable of performing those motions from scratch would have been extremely difficult. Luckily Potentia Robotics found a solution that allowed them to do some testing first.
“We turned to simulation, and in simulation we can build the robot on the computer. [The] simulation software [we use] is accurate so we can simulate real life physics on the computer.” Durai said.
Through highly advanced simulation software, efforts from team members such as sophomore Ram Vempati who has been spearheading the robot’s skeletal structure, and advice from veteran robotics teams, Potentia Robotics has been able to make big steps in simulating human movement.
“What we’re working on right now is getting feedback from other teams so we talked to Purdue ARC, which is a robotic team at Purdue,” Durai said.
As of now they’re working on creating a robot capable of balancing while walking up and down slopes. Once they’re ready to start building the prototype, however, they’ll run into another issue: funding.
“There’s a lot of different ways we can get funding,” Durai said. “A lot of kids could benefit from the tutoring we [can provide.] We actually ran a camp for python last year, and we’re going to be running a lot more camps [to get more funding. Corporate] sponsorships and grants are another way.”
While Potentia Robotics doesn’t have any sponsorships yet, their finance team has already brought in over 2000 dollars and is working on securing more grants to keep the team well-funded. With incoming funds and calibrated simulation software, the road is paved for the future of Potentia Robotics.
“Right now we have about 20 people on the team,” Durai said.
While Vasantharao himself takes a leadership role as organization president, organizing team efforts and managing assignments, the other members of Potentia Robotics are organized into sub-teams for Programing, and Engineering, with the third team for electronics.
“[The programming team works on] the mind of the robot, controlling the walking, the movement, all that good stuff. The engineering team works on designing and building the robot.” Durai said.
Melding the two teams together is the electronics team, which is responsible for the wiring on the robot and making sure the robot’s brain is able to communicate with the limbs. These three teams work together to combat the various challenges facing Potentia Robotics.
“Right now we’re working on the physics of the motors, the torque required to move all the limbs. We had to tweak our design a little bit because the motors that we need are a little more powerful than we expected.” Vasantharao said.
As Potentia Robotics grows ever closer to their goal of a fully functioning prototype they’re proving to the world that high-level engineering projects can be completed by any student with enough motivation.
“Ultimately that’s the goal. We want to change the mentality that age is the limiting factor in innovation and large-scale research projects.” Durai said.
Potentia Robotics not only hopes to prove but also to inspire.
“Be curious. There are so many avenues in today’s world, so many great things [you can do] especially at [Jefferson]. You’re only limited by your ideas.” Durai said.